















EtherCAT Module
P876
EtherCAT sets new standards for real-time performance and topology flexibility, whilst meeting or under cutting other fieldbus cost levels.

Features
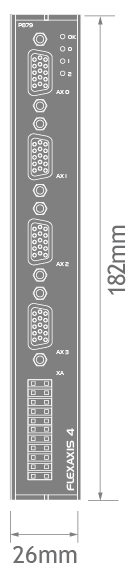
- 8 Registration inputs repeatable to 100nS per module
- Drive parameters setup from the controller
- Position Set point update 0.125mS
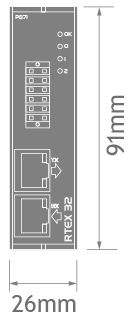
- RJ45 Connector
- 4 LED status indicators
P876 EtherCAT master module enables the MC664 Motion Coordinator to enter a very exclusive club offering an independent, standalone EtherCAT master for motion control; this arrangement enables up to 64 axes of any manufacturers' EtherCAT-compatible drives and motors - or other devices - to be controlled. The module comes with 2 axes enabled. Further axes can be enabled with ‘Feature Enable Codes’.
Every axis can be programmed to move using linear, circular or helical interpolation, electronic cams and gearboxes. Features include support for merging multiple moves that are typically generated by CAD/CAM software, plus support is provided for continuously rotating machinery. EtherCAT also offers the major advantage of high-precision device synchronisation.
| Network | EtherCAT |
| Network Speed | 100Mbps |
| Topology | Chain |
| Max Slaves per Interface | 64 |
| Max Interfaces per MC664 | 7 |
| Max Axes per MC664 | 64 |
| Cable | STP Cat 5-e or Better |
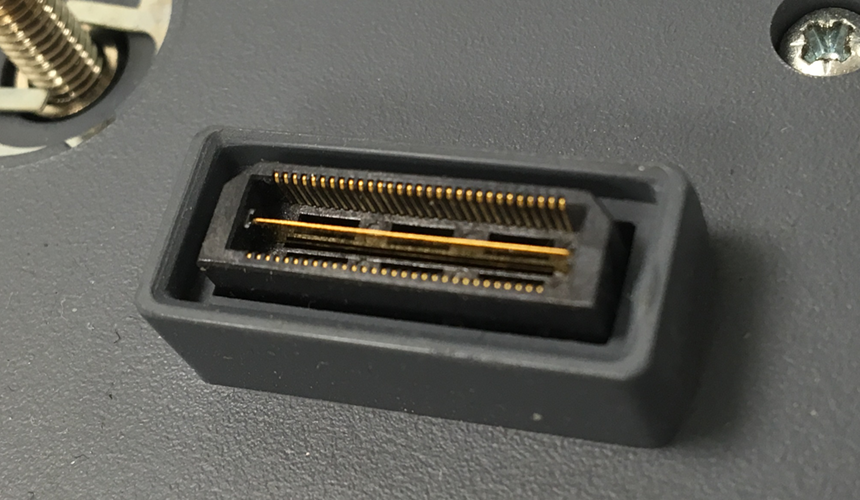
| Bus to MC664 | 32 Bit |
| Registration Inputs | 8 x 24V Inputs |
| Optically Isolated registration Inputs | Y |
| Map Any I/O to Any Axis | Y |
| Axis Feature Enable Codes | P914 |
| RoHs | Compliant |

| Guides | |
|---|---|
| Data Sheet | |
| Quick Start Guide | Simple set up guide |
| Flex Axis Splitter Cable (P381) | Simple Pin-Out guide |
| Manuals | |
|---|---|
| The Technical Reference Manual can be downloaded in full or as separate sections. All in PDF format. | |
| MC664 Expansion Modules (Chapter 3).pdf | |
| Certificates | |
|---|---|
| UL Listing | Please insert E238097 UL File Number in the search box. |
| CAD Data | |
|---|---|
| Drawings are available in the following formats: DXF, IGES, DWG, STEP and SolidWorks. These files are included in the Zip file below. | |
| Download Zip file | |
 Specification Specification |
|
|---|---|
| Speed | 100Mbps |
| Physical Layer | 100BASE-TX full duplex (IEEE 802.3) |
| Cable | Shielded Twisted Pair (TIA/EIA-568B CAT5e) |
| Topology | Line, tree or star (1) |
| Isolation | Pulse transformer with common-mode choke |
| Connector | RJ45 |
| Cable Length | 100m max between nodes |
| Cyclic period | 125µsec (Flex-X Nano, Flex-6 Nano, MC6N) 250µsec (MC664-X) 500µsec, 1000µsec, 2000µsec or 4000µsec (MC664, Flex-6 Nano, Flex-X Nano, MC6N) |
| Synchronisation | Distributed Clocks technology. Jitter < 1 µsec |
| Protocol | CoE, SoE (2) |
| Number of Axes | 32 (MC4N) 64 (MC464+P876) 128 (MC664-X) 64 (PC-MCAT-64, PC-MCAT-2) 64 (Flex-X Nano, Flex-6 Nano, MC6N) |
| Number of Nodes | 128 slave nodes maximum |
| Motion modes | Cyclic Synchronous Position, Cyclic Synchronous Velocity, Cyclic Synchronous Torque |
| Parameter transfer | CoE Object read/write. SoE IDN read/write |
| Input/Output | Up to 1024 input bits and 1024 output bits |
| (1) Tree and star require the use of EtherCAT switches. (2) CanOpen application protocol over EtherCAT. (CoE) Servo drive profile according to IEC 61491 over EtherCAT. (SoE) |
|