EtherCAT
Mini Master
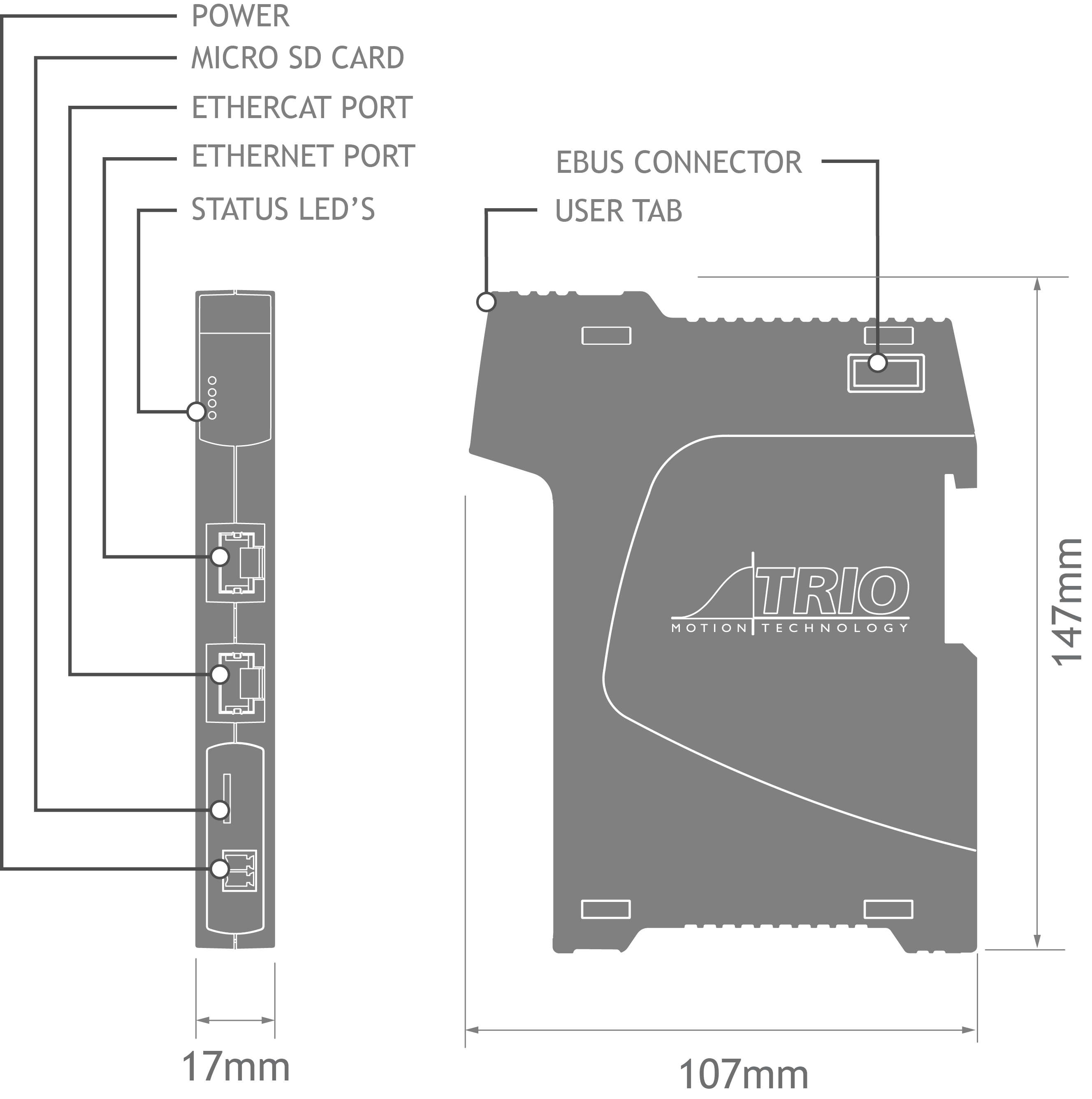
MC4N-ECAT Mini Master
P900 (2 Axis) | P901 (4 Axis) | P902 (8 Axis) | P903 (16 Axis) | P904 (32 Axis)
The MC4N is a high performance Motion Coordinator which is dedicated to running remote servo and stepper
drives via the EtherCAT real time automation bus. It is based on an up-rated version of the 532MHz ARM 11 processor
which makes it ideal for high axis count machines or robotic applications.


Highlights
- Up to 32 EtherCAT Digital Drive Axes
- Supports Position, Speed and Torque Drive Modes
- Up to 1024 EtherCAT I/O
- EtherCAT CoE protocol to CiA402
- Linear, Circular, Helical and Spherical Interpolation
- Flexible CAM shapes, Linked Motion
- Isolated Encoder Port
- Biss, EnDAT and SSI Absolute Encoder Supported
- Hardware Linked Output for Camera / Laser Control
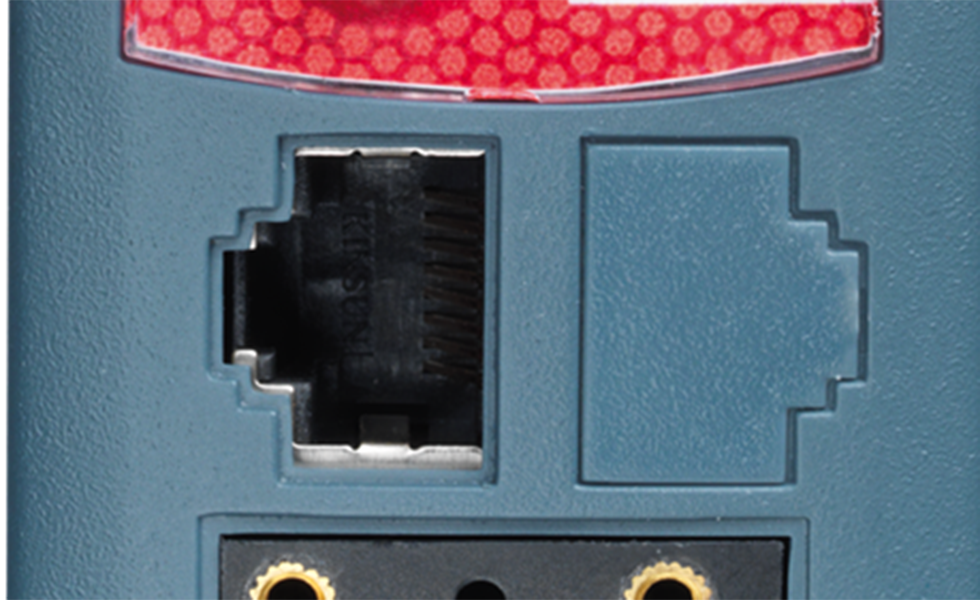
- Ethernet-IP / Modbus TCP / Trio ActiveX / Uniplay HMI / UDP / Ethernet Interface Built-In
- Precise 64Bit Motion Calculations with 532MHz ARM 11 Processor
- IEC 61131-3 Programming
- Multi-tasking BASIC Programming
- Text File Handling
- Robotic Transformations
- 4 high speed registration inputs
- Isolated RS232 and RS485 ports
- SD Memory Card Slot
- EtherCAT I/O Expansion
- CANopen I/O Expansion
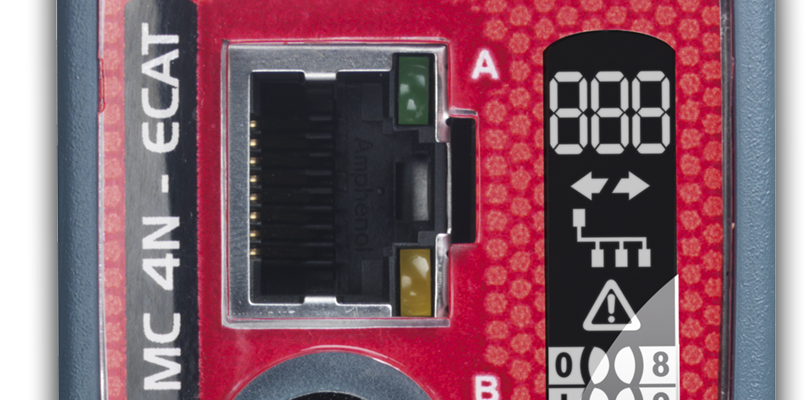
- Backlit LCD Display
- RoHS and CE Approved
Plug and Play
The MC4N supports up to 32 axes of motion with 64 bit integer position registers for ultra precise axis resolution. EtherCAT slave drives and I/O can be connected and run in cyclic synchronous position, speed or torque modes provided these are supported by the drive.

EtherCAT
The P900 has 2 built-in EtherCAT axes which can be user upgraded with the purchase of P912 Remote Axis FECs.
Each P912 doubles the available axes, i.e:
P900 + 1 x P912 = 4 Remote Axes
P900 + 2 x P912 = 8 Remote Axes
P900 + 3 x P912 = 16 Remote Axes
P900 + 4 x P912 = 32 Remote Axes
Of course, the MC4N can be purchaced with axes factory loaded ie:
P900 = 2 Axes
P901 = 4 Axes
P902 = 8 Axes
P903 = 16 Axes
P904 = 32 Axes
Every axis can be programmed to move using linear, circular or helical or spherical interpolation, electronic cams, linked axes and gearboxes. The power of the controller allows for multiple robotic transformations to run simultaneously.
Easy to use
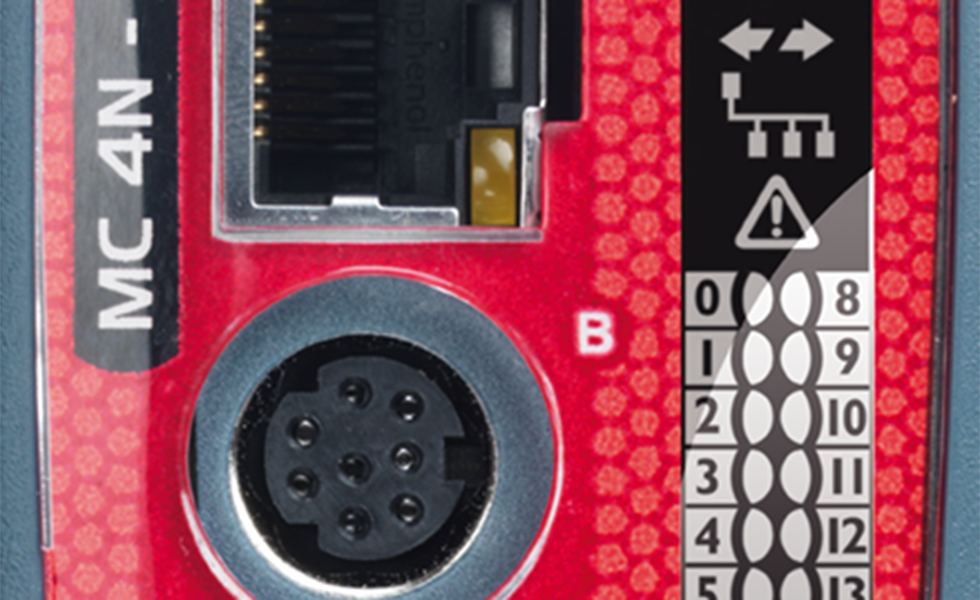
A bright easy to read backlit display enables the controller status to be easily determined, whilst the single piece metal cast backplate provides an integrated earth chassis to improve noise rejection in the industrial environment.
Familiar Tools

The built-in Ethernet port allows programming and connection of common PLC and HMI protocols, including the Trio Uniplay range of HMIs, directly to the MC4N. User programs can be written in Trio’s established multi-tasking TrioBASIC language using the powerful Motion Perfect v4 application development software making complex motion easy. The industry standard IEC 61131-3 languages are available as an option, allowing a fully functional PLC programming system.
 Specification
Specification













